Китайський марсохід вдосконалив навігацію за допомогою точного 3D-картографування
Міждисциплінарна команда дослідників з Китаю розробила нові методи візуальної локалізації та топографічного картографування, які суттєво покращили здатність марсохода Жужун орієнтуватися на поверхні Червоної планети.
Ці інновації стали ключовими для успіху місії «Тяньвень-1» — першої незалежної міжпланетної експедиції Китаю.
Джерело: phys.org
Дослідження опубліковане в журналі IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing. Автори — науковці з Інституту аерокосмічної інформації Китайської академії наук та Пекінського центру космічного управління.
Інновації для Марсу
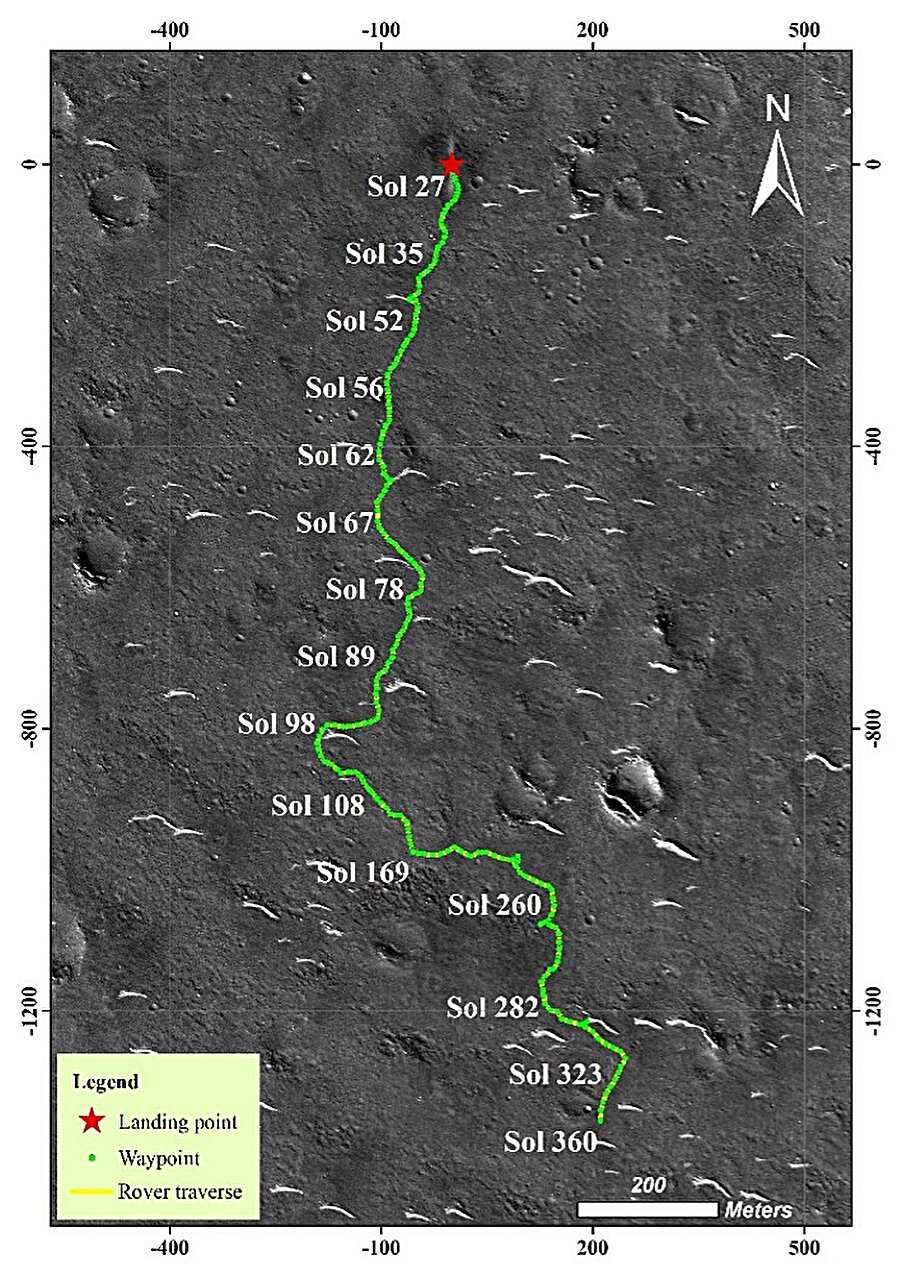
Місія «Тяньвень-1», запущена у липні 2020 року, мала на меті дослідити геологічну структуру, клімат і рельєф Марса. Марсохід Жужун здійснив посадку 22 травня 2021 року в районі Утопія Планітія. Його здатність виконувати наукові завдання безпосередньо залежала від точності локалізації та високоякісних топографічних карт.
У межах дослідження команда вдосконалила зображення з навігаційних і оглядових камер за допомогою корекції затемнення (vignette correction) та онлайн-калібрування щогли з камерами. Це дозволило створювати тривимірні карти місцевості з точністю до сантиметрів — критично важливою для аналізу перешкод та планування маршруту марсохода.
Більше точності — більше даних
Завдяки поєднанню візуальної локалізації з порівнянням цифрових ортофотопланів дослідники змогли досягти точності позиціонування до 0,50% від довжини маршруту. Для порівняння, внутрішня навігаційна система Жужуна має похибку 3,11%.
Фактична відстань, яку подолав марсохід, склала 2009 метрів — на 88 метрів більше, ніж показує його одометр. Різниця зумовлена ковзанням коліс на схилі, що підкреслює важливість високоточної локалізації для аналізу переміщень на поверхні планети.
2025-04-15 11:26:28